dfg


Коммуникационные возможности панелей оператора Kinco Automation.
Коммуникационные возможности панелей оператора Kinco Automation.
Описана аппаратная конфигурация физических портов связи HMI Kinco. Приводится перечень драйверов специализированных и открытых протоколов связи, пример настройки обмена данными между HMI и ПЛК по шине RS485/Modbus RTU.
Назначением панелей оператора является визуализация и управление локальными технологическими установками. Для интеграции в общую структуру АСУ ТП, современные HMI обладают широкими коммуникационными возможностями, включая разнообразие физических портов связи и цифровых протоколов обмена данными. При этом методология конфигурации связи в среде разработки проектов для HMI должна быть максимально простой и интуитивно понятной.
Физические порты связи на панелях оператора Kinco Automation
В настоящие время, линейка панелей оператора Kinco представлена тремя сериями: Green, Future и панелями оператора специального исполнения. Панели оператора данных серий имеют, как последовательные порты связи RS485/RS232, так и порты Ethernet. Количество портов зависит от конкретной модели HMI. В табл.1 приводится информация о коммуникационных портах HMI с 7-ми дюймовым дисплеем, серия Green.
Таблица 1. Физические порты связи HMI.
|
Модель |
GL070E |
G070E |
GH070E |
GT070E2 |
GT070HE |
|
RS232/RS485(2/4) |
COM0: RS232/RS485. COM2: RS232. |
COM0: RS232/RS485. COM1:RS485. COM2:
RS232. |
COM0: RS232/RS485. COM1:
RS232/RS485. COM2:RS232. COM3: RS485. |
COM0: RS232/RS485. COM1:RS485. COM2:
RS232. |
COM0: RS232/RS485. COM1:RS485. COM2:
RS232. |
|
FieldBus
(CAN) |
- |
1
шт. |
- |
- |
- |
|
Ethernet |
1
шт. (10/100 Мбит/сек.) |
1
шт. (10/100 Мбит/сек.) |
1
шт. (10/100 Мбит/сек.) |
2
шт. (10/100 Мбит/сек.) |
1
шт. (10/100 Мбит/сек.) |
|
Wi-Fi/4G |
- |
- |
- |
- |
1 шт. |
Исходя из данных табл.1 можно сделать следующие выводы:
1) Количество последовательных портов отличается в зависимости от модели (GL/G/GH/GT). HMI Kinco поддерживает двух и четырех проводное соединение по интерфейсу RS485. Часто, четырёх проводной интерфейс RS485 имеет обозначение RS422.
2) Модель G070E имеет порт FieldBus и возможность обмена данными по протоколу CANopen. Стоит обратить внимание, что G070E поставляется, как с дополнительным портом FieldBus, так и без него.
3) На моделях HMI, имеющих в конце маркировки букву “E” есть порт Ethernet. На борту GT070E2 есть два физических порта Ethernet.
4) Модель GT070HE поставляется в двух модификациях: c возможностью передачи данных по беспроводной сети Wi-Fi или сети 4G. Для работы в сетях 4G в панель оператора необходимо установить SIM карту оператора связи (МТС, МегаФон, и другие). Слот для SIM карты находится на боковой части панели оператора.
Драйвера связи специализированных и открытых протоколов в Kinco Dtools
На базе физических портов RS232, RS485, Ethernet может быть настроен обмен данными между устройствами АСУ ТП по цифровым протоколам связи. В Kinco Dtools реализованы драйвера, как открытых протоколов (Modbus, BacNet), так и драйвера связи для контроллеров различных производителей: ABB, Allen Bradley, Beckhoff, Delta Electronics, Mitsubishi, Siemens, Emerson, Omron, Schneider Electric. В табл. 2 приводятся данные о реализованных в Kinco Dtools драйверах связи. Полный перечень драйверов связи приводится в документации (название HMI and PLC connection guide). По мере развития Kinco Dtools, добавляются новые драйвера связи. В текущей версии (3.5.4.3) Kinco Dtools реализовано более 150 драйверов связи.
Таблица 2. Драйвера связи реализованные в Kinco Dtools.
|
Производитель |
Наименовании
линейки или серии устройств |
|
ABB |
AC31;
AC500. |
|
Allen Bradley |
MicroLogix;
CompactLogix; ControlLogix; SLC500; PLC-5; Micro850. |
|
Beckhoff |
CX9020;
CX2030. |
|
Delta Electronics |
DVP; Delta AS300; Delta MC;
Delta AH. |
|
Emerson |
EC10; EC20. |
|
Mitsubishi Electric |
FXCPU (включая FX3U, FX5U); QCPU; LCPU. |
|
Siemens |
S7-200; S7-200 SMART;
S7-300; S7-400; S7-1200; S7-1500; Simatic ET200; Siemens LOGO. |
|
Schneider Electric |
Micro; Premium; Nano; Twido;
M 258; TM100/200. |
|
Omron
|
SYSMAC C; SYSMAC CJ2; SYSMAC
CJ; SYSMAC CS; SYSMAC C, SYSMAC CP1. |
|
Открытые протоколы связи |
Modbus RTU; Modbus TCP; BACnet MS/TP; BACnet IP. |
Пример реализации настроек связи между HMI и ПЛК по шине RS485/Modbus RTU
Опишем настройку связи между ПЛК и панелью оператора Kinco по шине RS485/Modbus RTU. Первый случай. Панель оператора является «мастером» на шине RS485/Modbus RTU, контроллер является подчинённым устройством. Общие количество контроллеров два.
В Kinco Dtools создаём новый проект. В процессе создания проекта появится окно, в котором разработчик задаёт название проекта и может выбрать размер дисплея HMI. Исходя из выбранного размера дисплея, программа отобразит список доступных моделей HMI (рис.1). В нижней части окна приводится краткое описание выбранной модели HMI: разрешение дисплея, наличие аудио и видео выходов, информация о портах для загрузки проекта и связи с ПЛК.
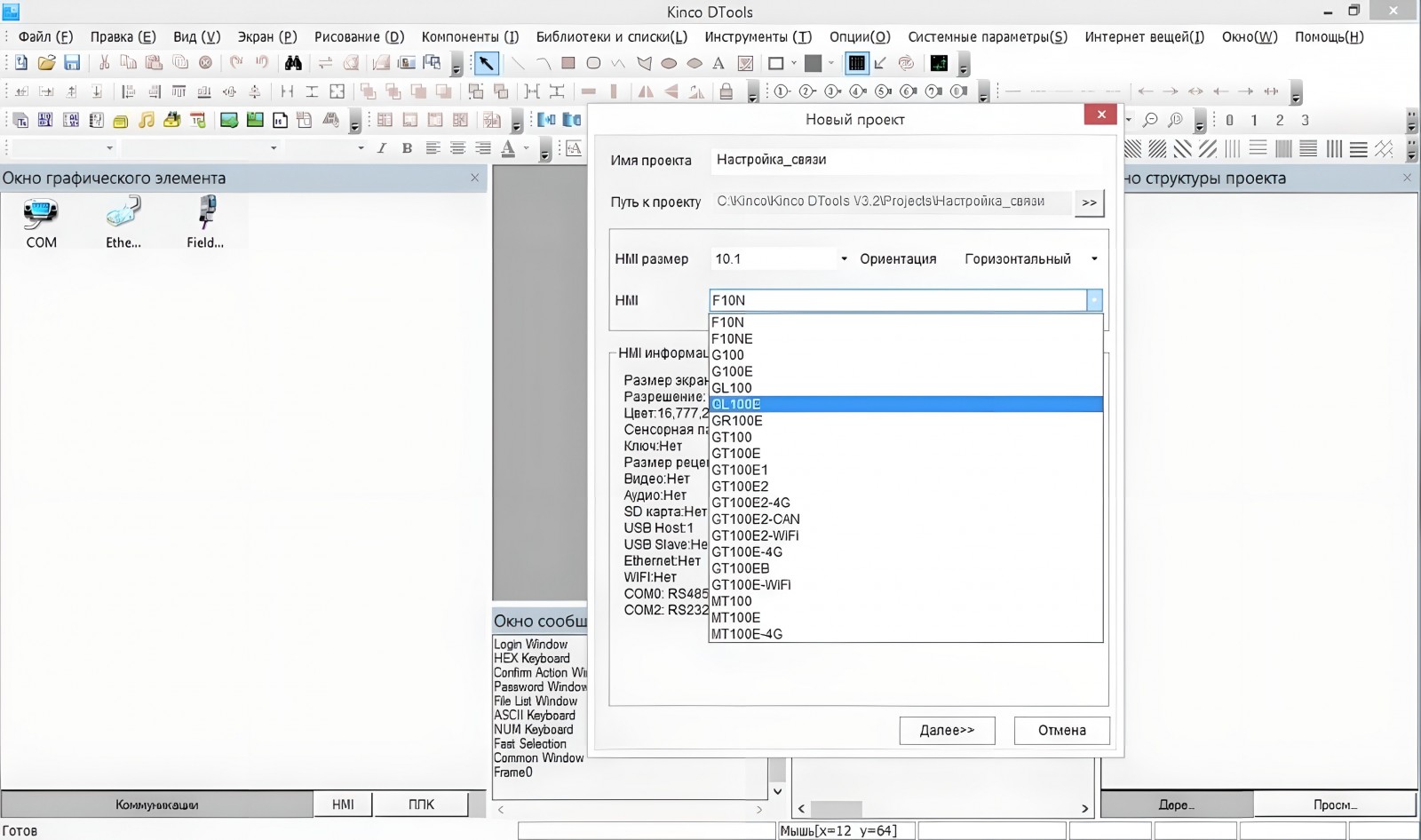
Рис. 1 – Окно создания проекта.
После конфигурации модели HMI, Kinco Dtools предложит задать настройки связи с ПЛК (рис.2). Для связи HMI и ПЛК по шине RS485/Modbus RTU необходимо настроить подключение к последовательному порту HMI. Модель GL100E имеет два последовательных порта (COM0, COM2). Порт COM2 поддерживает только интерфейс RS232. Порт COM0 поддерживает интерфейсы RS232 и RS485. Выберем порт COM0. В нижней части окна появятся настройки связи: интерфейс, скорость обмена данными, бит данных, четность, стоп бит (рис.2).
В разделе «Параметры устройства» есть графа «Производитель». В этой графе приводится список производителей (ABB, Allen Bradley, Siemens, Modbus, и.т.д). Выберем производитель Modbus, графа «Протокол» − Modbus RTU Extend и нажмём кнопку «Добавить». Количество ПЛК подключаем к HMI два, добавим выбранный драйвер два раза. В списке появятся два PLC с разными адресами станции. После конфигурации связи, необходимо нажать кнопку «Завершить». В рабочем поле программы отобразиться связь ПЛК с HMI (рис.3).
Кроме вышеописанного метода, процедуру конфигурации связи можно реализовать при помощи функции «drag-and-drop». В Kinco Dtools есть вкладки: «Коммуникации», «HMI», «ПЛК». Разработчик проекта может
добавить из этих вкладок соответствующие модели HMI и ПЛК в рабочие поле программы, объединить их связью и задать настройки.
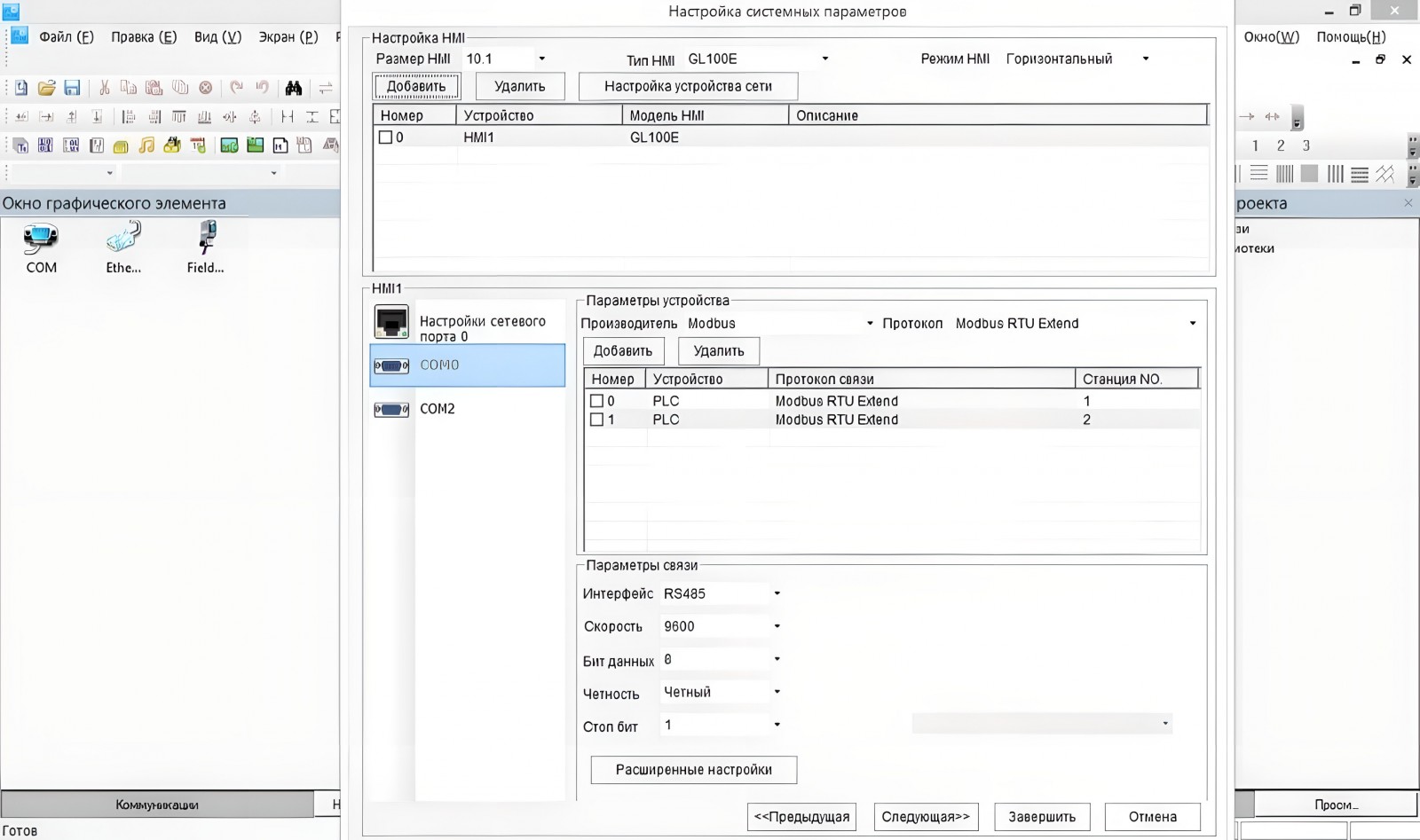
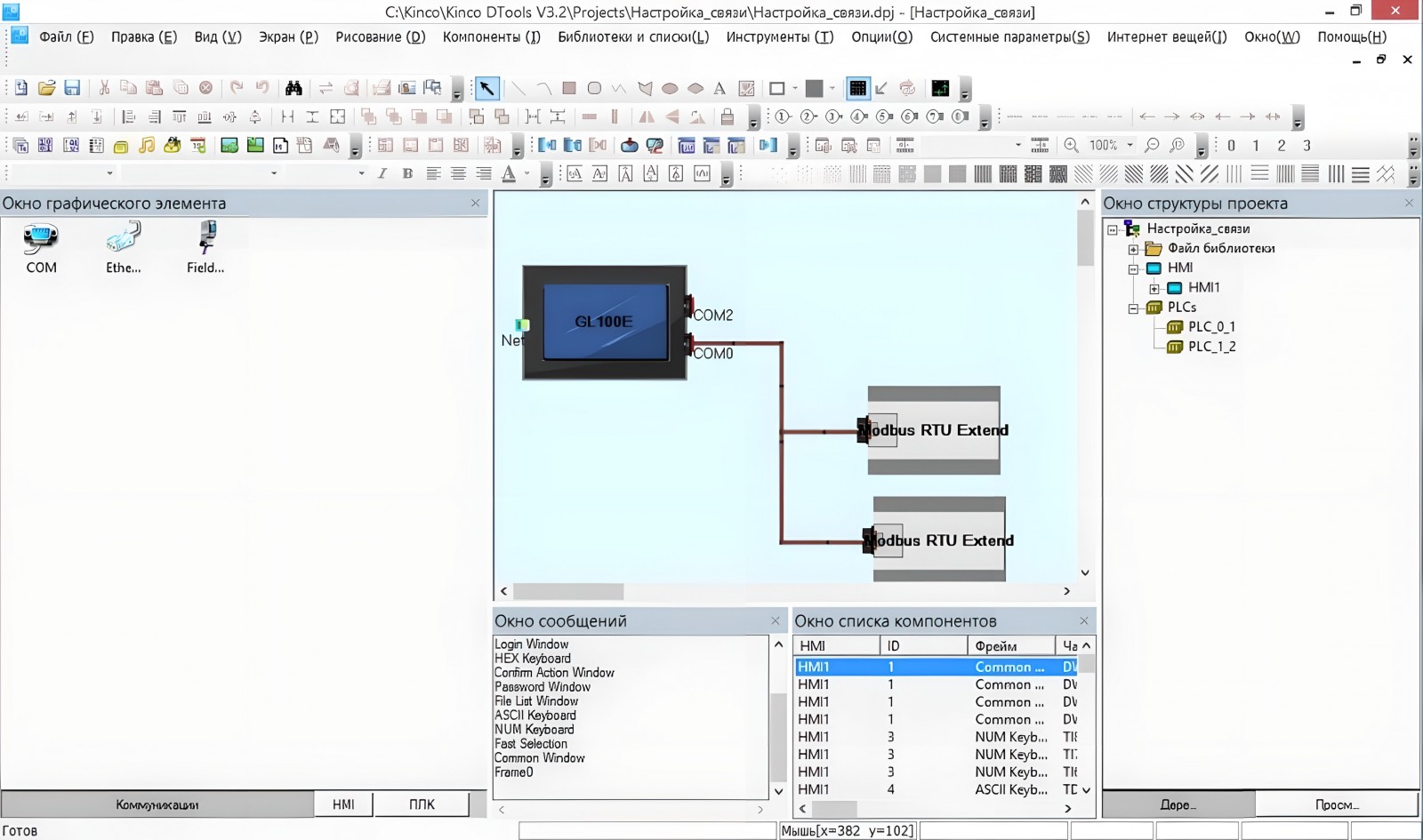
Рис. 3 – Рабочие поле программы, графическое отображение сконфигурированных связей.
При конфигурации шины RS485/Modbus RTU, в которой HMI Kinco будет подчинённым устройством, а ПЛК «мастером», необходимо использовать драйвер Modbus RTU Slave (вместо драйвера Modbus RTU Extend). При этом в настройках COM порта появится дополнительное окно − "Номер устройства" – адрес HMI в сети RS485 (рис.3).
На шине, где ПЛК является «мастером», к одному порту ПЛК может быть подключено несколько HMI. Пример реализации такого подключения приводится на рис.4.
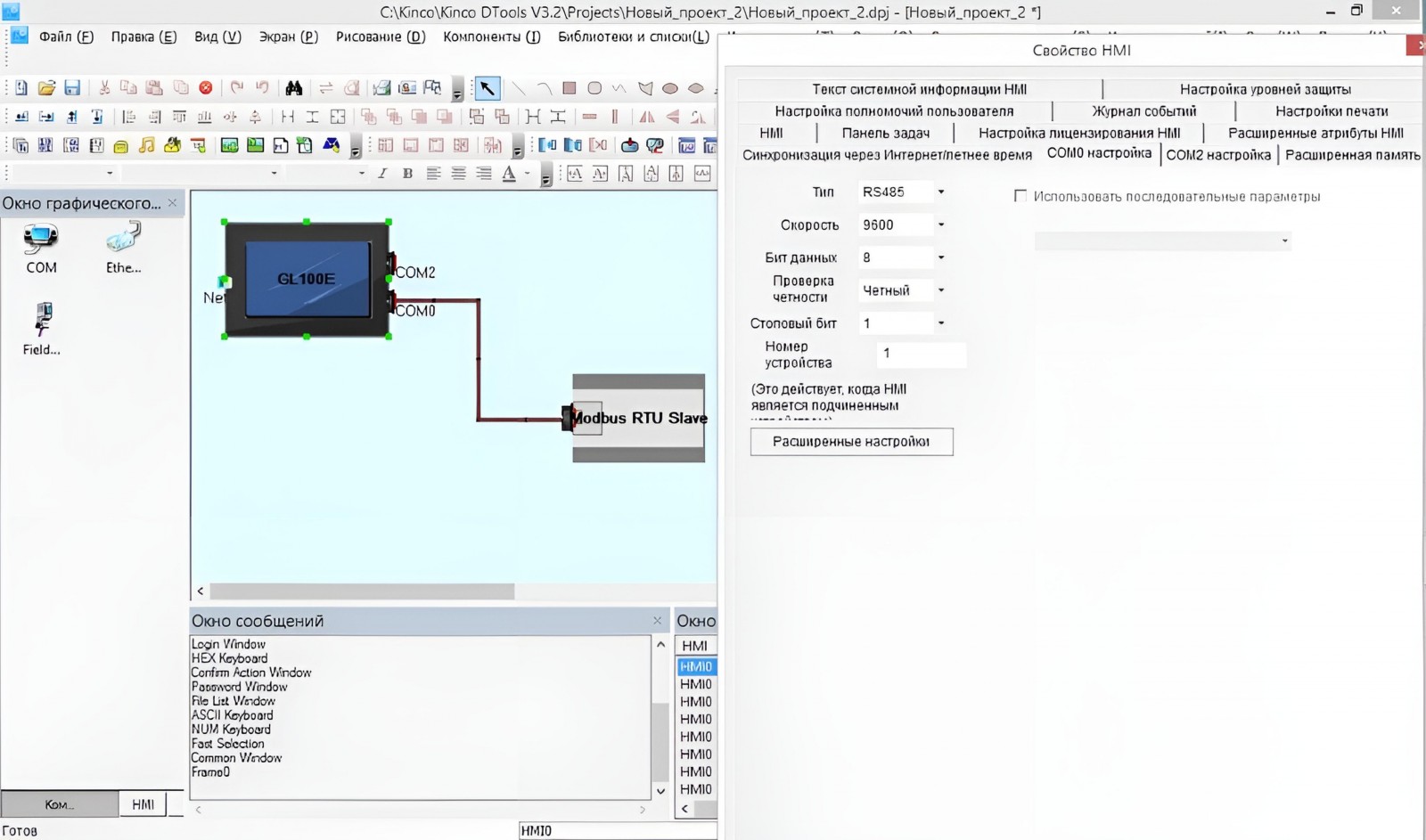
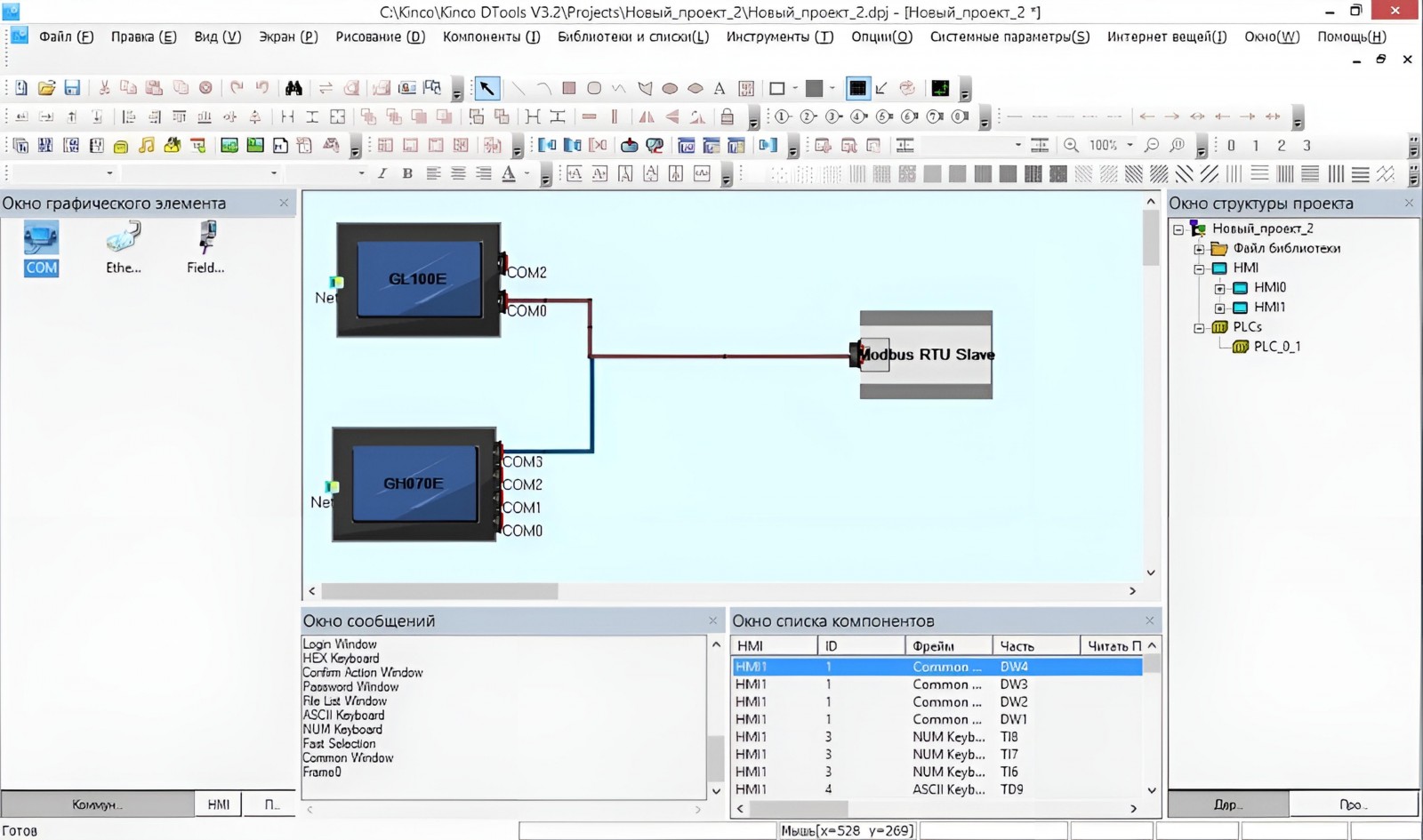
Рис. 4 – Подключение двух HMI к одному ПЛК (HMI подчинённые устройства на шине RS485/Modbus RTU).
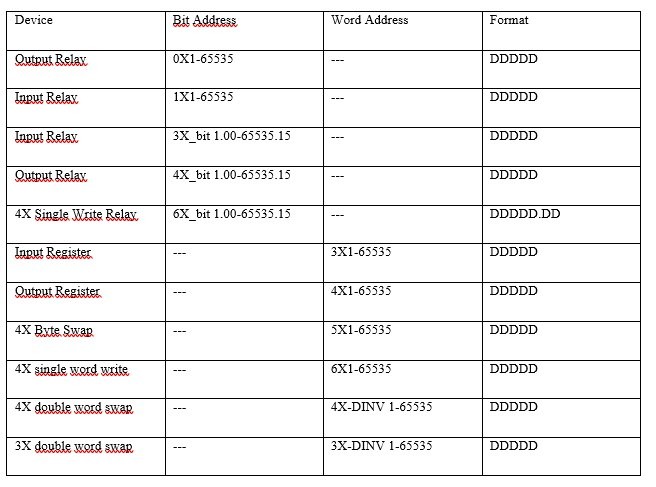
В случаях, когда HMI является «мастером» на шине, при настройке компонентов интерфейса HMI необходимо использовать области памяти драйвера Modbus RTU Extend (табл. 3).
Таблица 3. Области памяти драйвера Modbus RTU Extend
В случаях, когда HMI является подчинённым устройством на шине, при настройке компонентов интерфейса HMI необходимо использовать локальную область памяти HMI (табл. 4).
Таблица 4. Локальная область памяти HMI Kicno.
|
Device |
Bit Address |
Word Address |
Format |
|
Output Relay |
LB 0-9999 |
--- |
DDDDD |
|
Data register |
LW 0-65535 |
--- |
DDDDD |
ООО «Cиcтeмы Koнтpoля», г. Москва,
тел.: +7 (495) 120-3661,
e-mail: info@systemcontrol.ru,
сайт: systemcontrol.ru













СИСТЕМЫ КОНТРОЛЯ

поставка средств
автоматизации
Инженерные решения
Разработка и сборка щитов
управления
г. Москва, ул.Новгородская, д.1,стр.5, пом.Б402
e-mail: sales@systemcontrol.ru
+7 (495) 120-36-61
г.
Самара, ул.Советской Армии,
180/3, офис 506А
samara@systemcontrol.ru
+7 (846) 273-49-42